 Video aziendale
Video aziendale
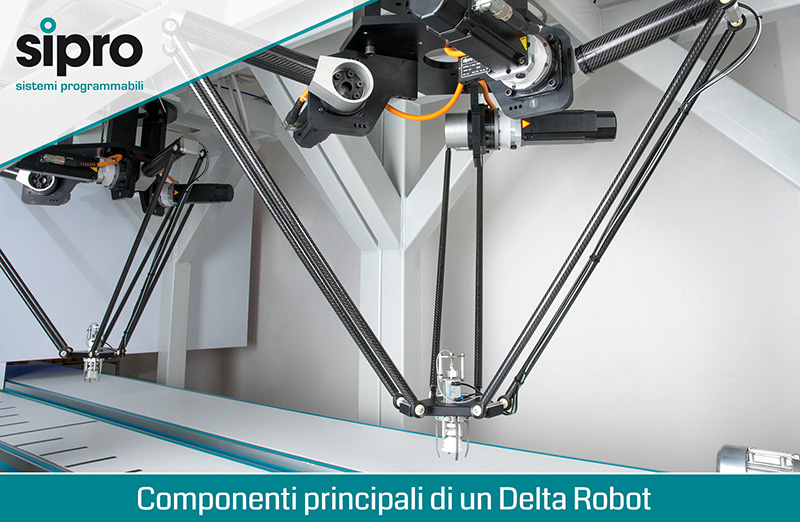
COMPONENTI PRINCIPALI DI UN ROBOT DELTA E MANUTENZIONE
Procediamo quindi presentando una carrellata dei principali componenti presenti sulla maggior parte dei robot e delle macchine a controllo numerico spiegando gli aspetti principali di manutenzione e usura. Risulta evidente che l’articolo vuole essere uno spunto di ragionamento e che per avere valutazioni più precise è necessario conoscere esattamente il tipo di tecnologia e il tipo di impiego della stessa.
Invitiamo sin d’ora tutti i responsabili aziendali che stanno valutando un processo di robotizzazione in azienda a contattarci se interessati per maggiori informazioni.
» End effector
Con end effector o "End of Arm Tooling" (o EoAT) si intende la parte finale della macchina, sostanzialmente la parte che lavora a contatto con il pezzo o con l’applicazione per cui è stato concepito.
Si tratta solitamente dell’estremità di un braccio meccanico che può essere pressoché qualsiasi tipo di strumento come una saldatrice, una ventosa, una pinza, un trapano, un avvitatore, ecc. Nella maggior parte dei casi questi componenti vengono autonomamente intercambiate dal robot per svolgere diverse attività sul medesimo pezzo; si pensi ad un macchinario che lavorando su un pezzo utilizza prima un trapano per effettuare il foro, poi una punta specifica per filettarlo, poi un avvitatore per avvitare, ecc.
Possiamo dire che è evidente che tutte queste parti sono quelle maggiormente sottoposte a utilizzo e devono, quindi, essere ciclicamente sostituite per garantire l’efficienza massima del robot.
» Pinze per robot
Gli end effector di cui abbiamo appena parlato hanno un utilizzo soprattutto in ambito produttivo.
Nel settore logistico l’equivalente è rappresentato dalle “Pinze per robot” (e altri strumenti simili), con cui si intendono le parti finali di bracci meccanici che afferrano prodotti o scatole e li spostano autonomamente in determinate aree.
Ci sono diverse tipologie di pinze ma tutte hanno la necessità di essere periodicamente sostituite e sottoposte a manutenzione essendo la parte maggiormente sollecitata e costantemente a contatto con diverse componenti.
» Sensori ottici
I sensori dei robot e dei macchinari a controllo numerico svolgono diverse funzioni che sono sostanzialmente assimilabili a quelle che svolgerebbe un operatore di macchina attraverso i propri sensi. Il sensore più comune è quello ottico (o di visione). Molti robot ne usano anche più di uno per svolgere diversi compiti come determinare la rugosità di una superficie, determinare lo spessore di un pezzo, effettuare misurazioni, valutare la produttività di una macchina, svolgere funzioni di sicurezza per gli operatori e molte altre.
Questo genere di sensori possono essere videocamere o hardware di diverso tipo in base all’applicazione specifica. Si tratta sempre di strumenti che devono essere regolarmente verificati e aggiornati per garantire sempre la massima resa e affidabilità.
» Scanner laser
Si tratta di un tipo di sensore ottico che merita una sezione specifica essendo tra i più utilizzati.
Hanno svariati tipi di applicazioni come la lettura di codici a barre, effettuano misurazioni molto precise, permettono ai robot mobili di farsi strada autonomamente evitando gli ostacoli sul loro cammino. Vengono spesso installati anche su droni che effettuano operazioni di inventario di magazzino e lettura codice prodotti.
» Sistemi di visione
Con sistemi di visione in ambito di macchinari e robot si intende la capacità del sistema di trasformare i dati in informazioni utili. In particolare per arrivare a questo risultato sono necessari hardware (spesso più di uno per ogni applicazione) come scanner, videocamere e software in grado di elaborare i dati grezzi che vengono acquisiti.
Questo aspetto è certamente uno di quelli che sta avendo maggiore sviluppo.
La possibilità di acquisire dati ed elaborarli in modo da renderli interessanti ai fini della robotizzazione dei processi è un aspetto che negli ultimi anni ha permesso di creare macchine completamente indipendenti.
Il miglioramento degli hardware (videocamere e scanner) ha permesso di avere dati molto precisi, i software permettono, invece, di usare i dati acquisiti ed elaborarli per rendere i robot sempre più autonomi; qualche anno fa, ad esempio, i sistemi di visione permettevano al robot di fermarsi in determinate circostanze, oggi riconoscono i volti umani, i macchinari che incontrano nello svolgimento delle operazioni e si comportano in modo sempre più autonomo e intelligente. Da un punto di vista tecnico il livello di intelligenza artificiale di un robot, in relazione alle situazioni che incontra nello svolgimento del lavoro, viene chiamata “comprensione della semantica di un ambiente”.
» Controller
Esistono tre grandi categorie di controller robotici:
| PLC | (Programmable Logic Controller) |
| PAC | (Programmable Automation Controller) |
| IPC | (Industrial Personal Computer) |
Il PLC è la tecnologia più datata e spesso il tipo di controller per robot più economico. Viene utilizzato per applicazioni semplici che non richiedono un controllo del movimento complesso.
Il PAC rappresenta una versione aggiornata del PLC. Il PAC ha più potenza di calcolo e permette controlli di movimento e applicazioni molto più complesse rispetto al PLC.
L'IPC ha una potenza di calcolo ancora maggiore ed è stato concepito con l’obiettivo di memorizzare una grande quantità di dati che possono poi essere utilizzati anche in un secondo momento. Permette inoltre di gestire movimenti molto complessi e di comunicare tramite un'ampia varietà di interfacce.
In questo ambito l’evoluzione è costante e, in tal senso, i controller dei robot possono essere periodicamente aggiornati ed è possibile effettuare upgrade per ottimizzare l’utilizzo dei robot esistenti o integrarne di nuovi.
» Batterie per robot
Alcuni robot o droni robotizzati funzionano grazie alle batterie. Anche in tale ambito, come noto, vi è una costante evoluzione. Lo sviluppo è rivolto alla creazione di batterie sempre più piccole, in grado di immagazzinare sempre maggiore energia e di caricamento sempre più veloce.
E’ evidente che si tratta di parti “consumabili” e che devono essere quindi sostituite (facendo anche spesso degli upgrade).
Come accennato tutto quanto fin qui esposto vuole essere uno spunto di riflessione, senza avere la pretesa di essere esaustivo o risolutivo, per gli “addetti ai lavori” che stanno valutando di robotizzare un determinato reparto aziendale.
Vi invitiamo a contattarci per avere ulteriori chiarimenti su questo argomento e per presentarvi le diverse applicazioni dei delta robot e dei nostri sistemi a controllo numerico per capire come automatizzare e robotizzare i diversi reparti aziendali.
Visualizza tutte le news
Per maggiori informazioni:
Oppure compila il form per essere ricontattato